
LEGO-Roboter mit Matlab programmieren
Die Maschinenbau-Studierenden des Schwerpunkts Virtual Engineering haben mit Lego Anlagen und Roboter gebaut und ihnen mit dem Programm Matlab Leben eingehaucht. Am Ende des Semesters flitzten Amphibien-Fahrzeuge durch einen Parcours, stellten Roboterarme Dominosteine in Reih und Glied, sortierten Teile auf einem Förderband und spielten Vier gewinnt.
„Matlab ist eine Software speziell zur Programmierung und Lösung ingenieurtechnischer Probleme“, erklären die Projektbetreuer Prof. Dr.-Ing. Gangolf Kohnen, Studiengangsleiter an der DHBW in Mosbach, und Dr.-Ing- Manuel Ludwig, Lehrbeauftragter an der DHBW Mosbach. Mit den Toolboxen können auch spezifische Themen aus den Ingenieurwissenschaften ganz gezielt und einfach gelöst werden, beispielsweise Probleme aus der Regelungstechnik, angewandten Mathematik, Mechanik, Verfahrenstechnik. Auch die Lösung mathematischer Gleichungen, die Erfassung von Sensoren und die Verarbeitung, Speicherung und Darstellung in einer Benutzeroberfläche ist mit den umfangreichen Funktionen von Matlab möglich.
Mit den Lego Mindstorms fanden die zwei Projektbetreuer eine Möglichkeit, individuelle Projekte für Studierende umzusetzen und Mathematik, Programmierung, Mechanik und Montage zu verknüpfen. Mit den Lego-Utensilien können Fertigungsstraßen, Roboter, Fahrzeuge und alles, was das Herz begehrt, aufgebaut werden. „Insbesondere die umfangreiche Sensorsammlung der Lego Mindstorms überzeugt bei solchen Digitalisierungsprojekten“, so Kohnen und Ludwig.
Die Studierenden haben in dem Projektkurs zunächst Grundlagen in Matlab sowie die Erstellung von Benutzeroberflächen kennengelernt. Auf dieser Basis war es dann möglich, dass jede studentische Arbeitsgruppe sich ein Oberthema für die eigene Projektarbeit aussuchte und die Betreuer dieses Thema dann zu einem großen Programmier-, Entwicklungs-, Datenerfassungs- und Datenvisualisierungsprojekt machten.
„Die Studierenden lernen dabei sehr praxisnah den Umgang mit Matlab sowie im Rahmen der Projektarbeit auch die Arbeit in einem Team und die Umsetzung einer Problemstellung, wie sie typischerweise in der industriellen Praxis auftritt“, erklärt Professor Kohnen. Manuel Ludwig ergänzt: „Aufgabenstellungen dieser Art zielen auf die Entwicklung des System- und Prozessdenkens ab, die in der Studienrichtung Virtual Engineering eine zentrale Rolle spielen.“
Die nächsten Studierendengruppen stehen bereits in den Startlöchern. Das Interesse an dem Projektkurs Matlab ist riesengroß und die Betreuer freuen sich darauf, neue, spannende Projekte umsetzen zu können.
Abfüllanlage
Für die Abfüllanlage programmierten die Studierenden einen Parcour für den Roboter. Der Roboterarm sollte die Teile auf dem Förderband farblich sortiert in die richtigen Kästen ablegen. Während der Fahrstrecke sollten alle Sensordaten aufgezeichnet und live in einem Diagramm auf dem Bildschirm gezeigt werden (z. B. aktueller Ort jedes Teils, Geschwindigkeit der Bänder). Auch die Zeiten, die das Teil auf dem Förderband lag und wie lange der Roboterarm für die Bewegung benötigt hat, sollten gespeichert werden. Die Daten zu einem Teil mussten für die Aufgabenstellung mit Zeitstempel versehenen werden, so dass eine eindeutige Zuordnung zu jedem Teil möglich ist.
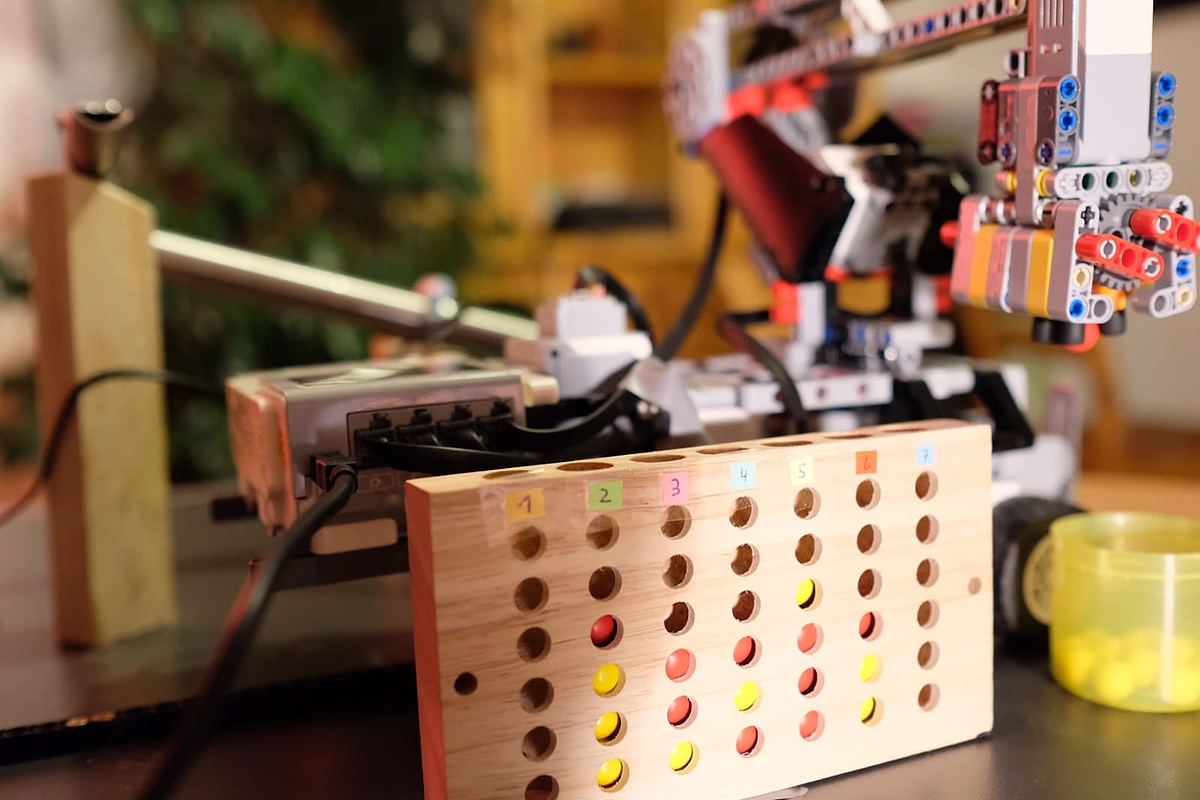
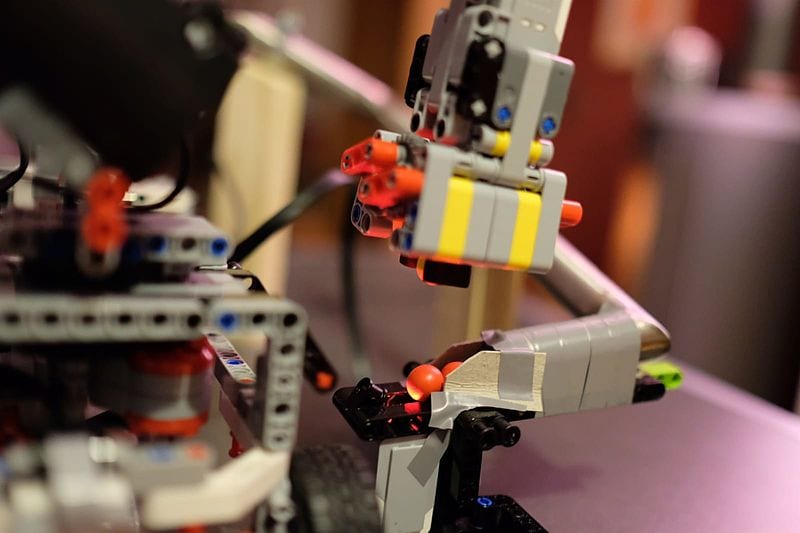
Roboteram spielt Vier gewinnt
Mit einem Roboterarm haben die Studierenden Vier gewinnt gespielt. Dabei mussten sie die Spielsteine (=Bälle) holen und einwerfen. Ein Farbsensor stellte dabei sicher, dass die richtige Farbe ausgewählt wurde. Während des Spiels mussten alle Sensordaten (Drehbewegung der Motoren, Drehwinkel und Höhe des Greiferarms) aufgezeichnet und live in einem Diagramm in der graphischen Benutzeroberfläche angezeigt werden. Am Ende jedes Programmablaufs werden alle Daten und der Spielablauf abgespeichert. Die Studierenden integrierten außerdem eine Schaltfläche zur automatischen Wiederholung eines gespeicherten Spiels.
Vier gewinnt: Foto-Dokumentation aus der studentischen Gruppe
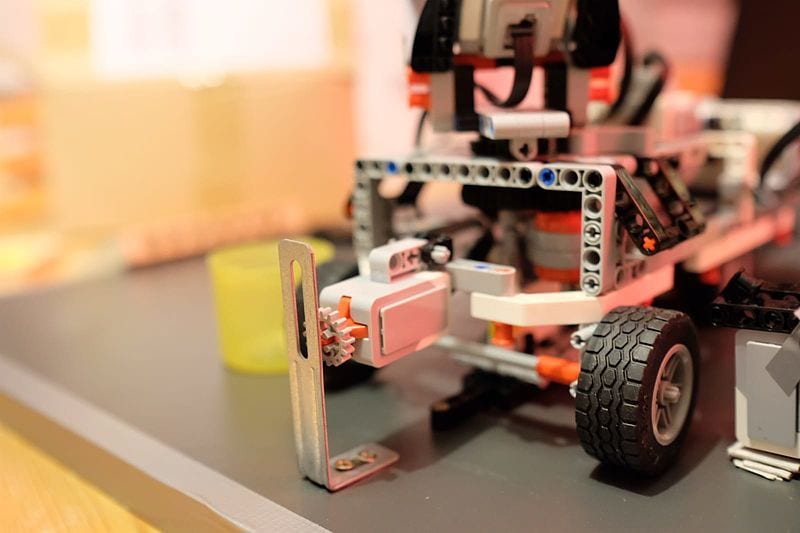
Amphibienfahrzeug im Gelände
Für das Amphibien-Fahrzeug erstellten die Studierenden einen Kurs mit Kurven, Steigungen und Gefälle. Das Fahrzeug sollte durch zwei separate Antriebe gelenkt werden. Während der Fahrstrecke mussten alle Sensordaten aufgezeichnet und live in einem Diagramm in der graphischen Benutzeroberfläche angezeigt werden. Auch eine Schaltfläche ist vorhanden, um die aufgezeichneten Sensorsignale zu analysieren. In einem Diagramm werden Höhenmeter und Geschwindigkeiten ausgegeben. Am Ende jedes Programmablaufs werden alle Daten unter einer spezifisch benannten Datei abgespeichert.
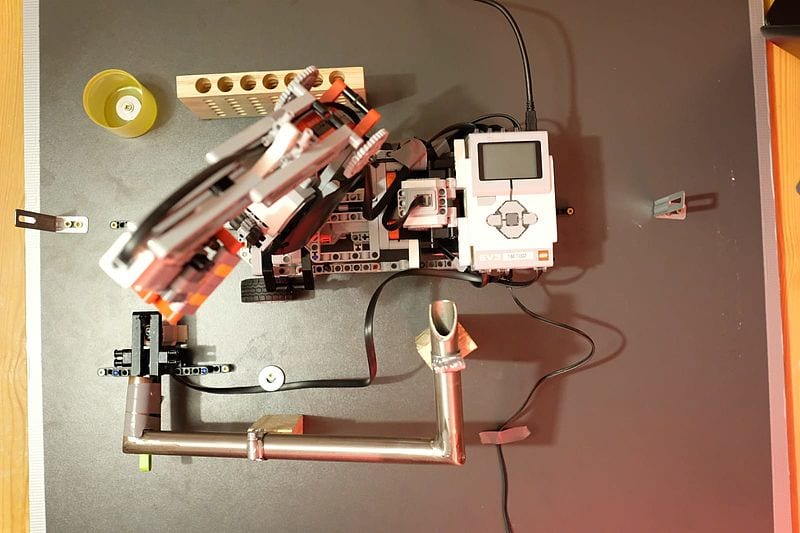
Roboterarm mit Fernbedienung
Der Roboterarm mit Fernbedienung stellt Dominosteine auf und stößt sie anschließend um. Die Studierenden haben dafür eine übersichtlich dargestellte graphische Benutzeroberfläche erstellt. Während der Durchführung des Programmes sollen alle Sensordaten aufgezeichnet und abgespeichert werden, die dabei live in der Benutzeroberfläche zu sehen sind. Mit einem Gyroskopsensor kann der Roboter wie mit einer Fernsteuerung bedient werden.